Raspberry Pi 外设
本文档介绍如何在 Raspberry Pi 上运行 TuyaOpen 的外设示例(examples/peripherals),包含 GPIO、I2C、SPI、PWM、UART等。
快速开始
- 确保你已完成 TuyaOpen 基础环境搭建,并进入 TuyaOpen 仓库根目录。
- 打开配置界面:
- 运行
tos.py config menu - 选择板卡:
Choice a board → LINUX → Choice a board → RaspberryPi - 选择型号:
Raspberry Pi Board Configuration → Choose Raspberry Pi model → Raspberry Pi 5(按实际型号选择)
- 按需开启外设开关:进入
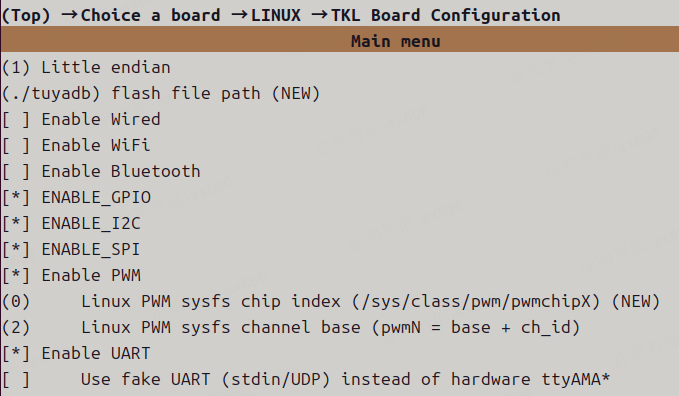
Choice a board → LINUX → TKL Board Configuration,勾选ENABLE_GPIO/ENABLE_I2C/ENABLE_SPI/ENABLE_PWM/ENABLE_UART。
- 进入对应示例目录(如
examples/peripherals/gpio),执行tos.py build编译,然后用sudo运行生成的*.elf。
说明(编译方式):Raspberry Pi 支持交叉编译与本地编译两种方式;构建时会根据当前平台自动选择合适的编译方式。
通用说明
- 权限:外设示例通常需要访问
/dev/*或/sys/class/*,建议在树莓派上运行时使用sudo。 - 设备节点:不同系统镜像下外设节点名称可能不同(例如 UART 可能是
/dev/ttyAMA0或/dev/ttyS0)。如节点与 TuyaOpen 端口映射不一致,请以实际节点为准做适配或调整配置。 OPRT_NOT_SUPPORTED:部分 TKL 外设接口为跨 MCU/Linux 统一抽象而保留;在 Raspberry Pi(Linux 用户态)下,如果底层标准接口(如 i2c-dev/spidev/sysfs/tty/gpio-cdev)无法提供对应能力,或需要额外内核驱动/子系统支持但当前适配未实现,则该接口会返回OPRT_NOT_SUPPORTED。
GPIO 示例
本示例演示如何在 Raspberry Pi 上使用 TuyaOpen 操作 GPIO。
适配说明(Linux TKL GPIO)
已支持(可用)
- 基础读写
tkl_gpio_init()/tkl_gpio_deinit():基于 Linux gpio-cdev(/dev/gpiochip*)申请/释放 line handle。tkl_gpio_write()/tkl_gpio_read():通过GPIOHANDLE_*ioctl 写入/读取电平。
- 中断回调(事件通知)
tkl_gpio_irq_init()/tkl_gpio_irq_enable()/tkl_gpio_irq_disable():通过GPIO_GET_LINEEVENT_IOCTL请求事件 fd,并由线程poll()监听触发回调。
说明/限制
- 依赖系统提供
/dev/gpiochip*(内核需启用 gpio 字符设备接口,且当前用户具备访问权限;通常建议sudo运行示例)。 TUYA_GPIO_NUM_E在 Linux 侧按 gpiochip 的 line offset 使用;在树莓派上通常与 BCM GPIO 编号一致,但不同发行版/内核配置可能存在差异,建议用gpioinfo/pinctrl核对。TUYA_GPIO_IRQ_LOW/HIGH属于“近似实现”:底层使用边沿事件监听,再读取当前电平做过滤,不等同硬件电平触发中断。
参考
- GPIO 的接口定义、参数说明与适配注意事项请参考 GPIO驱动。
进入示例目录
cd examples/peripherals/gpio
配置
启动配置界面:
tos.py config menu
按“快速开始”完成板卡与型号选择后,进入:Choice a board → LINUX → TKL Board Configuration并勾选 ENABLE_GPIO。
提示:GPIO 引脚分布图与 RP1 复用功能表可参考 树莓派 5 GPIO 参考手册。
在 Application config 中选择合适的引脚作为:
- output pin
- input pin
- irq pin
请确保所选引脚为空闲且与硬件连接一致。
编译与运行
编译:
tos.py build
编译完成后会生成类似 gpio_1.0.0.elf 的可执行文件。在树莓派上运行:
sudo ./gpio_1.0.0.elf
最小示例
下面代码演示:
- 初始化一个输出脚并每秒翻转一次电平
- 初始化一个输入脚并读取电平
说明:代码片段仅展示核心调用,完整可编译工程请直接参考
examples/peripherals/gpio。
#include "tal_api.h"
#include "tkl_gpio.h"
// 这两个宏在示例工程里通常通过 Kconfig/Application config 配置
// #define EXAMPLE_OUTPUT_PIN ...
// #define EXAMPLE_INPUT_PIN ...
static void gpio_min_demo(void)
{
TUYA_GPIO_BASE_CFG_T out_cfg = {
.mode = TUYA_GPIO_PUSH_PULL,
.direct = TUYA_GPIO_OUTPUT,
.level = TUYA_GPIO_LEVEL_LOW,
};
TUYA_GPIO_BASE_CFG_T in_cfg = {
.mode = TUYA_GPIO_PULLUP,
.direct = TUYA_GPIO_INPUT,
};
tkl_gpio_init(EXAMPLE_OUTPUT_PIN, &out_cfg);
tkl_gpio_init(EXAMPLE_INPUT_PIN, &in_cfg);
while (1) {
static uint8_t level = 0;
TUYA_GPIO_LEVEL_E in_level = TUYA_GPIO_LEVEL_LOW;
level ^= 1;
tkl_gpio_write(EXAMPLE_OUTPUT_PIN, level ? TUYA_GPIO_LEVEL_HIGH : TUYA_GPIO_LEVEL_LOW);
tkl_gpio_read(EXAMPLE_INPUT_PIN, &in_level);
PR_NOTICE("GPIO in=%d out=%d", (int)in_level, (int)level);
tal_system_sleep(1000);
}
}
I2C 示例
本章节演示如何在 Raspberry Pi 上使用 TuyaOpen 操作 I2C。
适配说明(Linux TKL I2C)
已支持(可用)
- 主机模式基础收发
tkl_i2c_master_send():对指定设备地址执行写入(底层使用/dev/i2c-X+I2C_SLAVE+write())。tkl_i2c_master_receive():对指定设备地址执行读取(底层使用I2C_SLAVE+read())。
- 寄存器读取的常见组合事务(Repeated Start)
- 当
tkl_i2c_master_send(..., xfer_pending=true)之后紧接tkl_i2c_master_receive(),会合并为一次I2C_RDWR事务,实现“先写寄存器地址/命令,再重复起始读数据”。
- 当
- 地址探测(扫描)
- 当
tkl_i2c_master_send()的size==0时,使用 SMBus “quick”方式尝试探测设备是否应答(适合做简单地址扫描)。
- 当
暂未支持(接口保留,当前实现返回 OPRT_NOT_SUPPORTED)
- 从机模式(Slave):
tkl_i2c_set_slave_addr()、tkl_i2c_slave_send()、tkl_i2c_slave_receive()。 - 中断/事件回调:
tkl_i2c_irq_init()、tkl_i2c_irq_enable()、tkl_i2c_irq_disable()。 - 扩展控制/状态查询:
tkl_i2c_ioctl()、tkl_i2c_get_status()。- 说明:
tkl_i2c_get_status()当前实现会将输出结构体清零后返回OPRT_NOT_SUPPORTED,请勿依赖其返回内容。
- 说明:
参考
- I2C 的接口定义、参数说明与适配注意事项请参考 I2C驱动。
在树莓派启用 I2C(系统配置)
在树莓派终端执行:
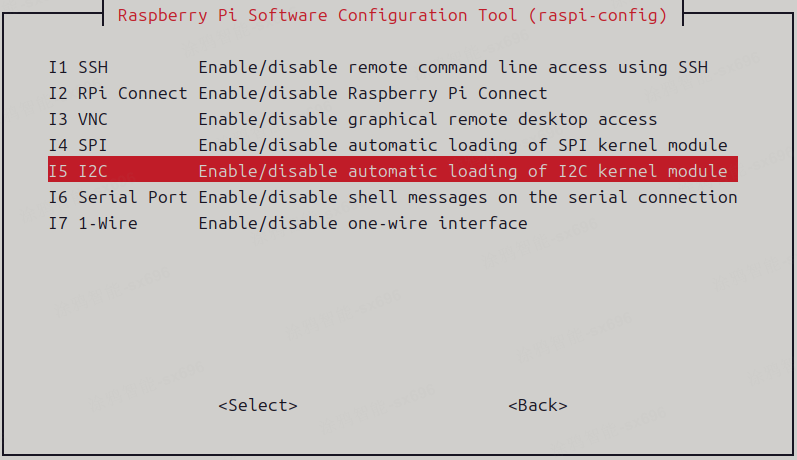
sudo raspi-config
在 raspi-config 中按以下路径启用 I2C:
3 Interface Options→I5 I2C→Enable
确认设备节点已创建:
ls /dev | grep i2c
示例 1:扫描总线(i2c_scan)
进入示例目录:
cd examples/peripherals/i2c/i2c_scan
配置:
tos.py config menu
Choice a board → LINUX → TKL Board Configuration:勾选ENABLE_I2CApplication config:配置i2c port、sda pin、scl pin
说明:
- Linux 适配会访问
/dev/i2c-${port}。 - 树莓派系统侧常见为
/dev/i2c-1(对应 GPIO2/3),因此i2c port通常需要与实际节点编号一致。
编译与运行:
tos.py build
sudo ./i2c_scan_1.0.0.elf
若扫描到设备,会打印类似日志:
[example_i2c_scan.c:xx] i2c device found at address: 0x44
最小示例
下面代码演示“扫描 I2C 7-bit 地址”(Linux 适配下 size==0 会走 quick 探测):
说明:完整可编译工程参考
examples/peripherals/i2c/i2c_scan。
#include "tal_api.h"
#include "tkl_i2c.h"
static void i2c_scan_demo(TUYA_I2C_NUM_E port)
{
for (uint8_t addr = 0x08; addr <= 0x77; addr++) {
// size=0:用于探测
if (tkl_i2c_master_send(port, addr, NULL, 0, TRUE) == OPRT_OK) {
PR_NOTICE("I2C device found: 0x%02X", addr);
}
}
}
示例 2:读取温湿度(sht3x_4x_sensor)
进入示例目录:
cd examples/peripherals/i2c/sht3x_4x_sensor
配置与编译方式同上,在 Application config 中选择:
sensor type:sht3x 或 sht4x
运行:
sudo ./sht3x_4x_sensor_1.0.0.elf
可看到周期性输出的温度与湿度日志。
SPI 示例
本示例演示如何在 Raspberry Pi 上使用 TuyaOpen 操作 SPI(用户态 spidev)。
适配说明(Linux TKL SPI)
已支持(可用)
- 主机模式(Master)
tkl_spi_init():打开/dev/spidevX.Y并配置 mode/bits/speed/bitorder。- 仅支持
TUYA_SPI_ROLE_MASTER/TUYA_SPI_ROLE_MASTER_SIMPLEX。
- 基础收发
tkl_spi_send():底层write()发送。tkl_spi_recv():底层read()接收。
- 传输
tkl_spi_transfer():SPI_IOC_MESSAGE(1)全双工 TX/RX。tkl_spi_transfer_with_length():SPI_IOC_MESSAGE(2)支持“先发后收”。
- 计数与状态(兼容接口)
tkl_spi_get_data_count():返回最近一次传输字节数。tkl_spi_get_status():返回OPRT_OK,当前仅清零结构体(不提供真实状态)。
暂未支持(接口保留,当前实现返回 OPRT_NOT_SUPPORTED)
- 中断回调:
tkl_spi_irq_init()/tkl_spi_irq_enable()/tkl_spi_irq_disable()返回OPRT_NOT_SUPPORTED。 - 扩展控制:
tkl_spi_ioctl()返回OPRT_NOT_SUPPORTED。
行为限制/兼容实现
- 中止传输:
tkl_spi_abort_transfer()返回OPRT_OK,但不执行真实 abort。 - DMA 长度:
tkl_spi_get_max_dma_data_length()返回 0(Linux spidev 下该值无实际意义)。
端口到设备节点映射(默认)
| spi port | 设备节点 |
|---|---|
| 0 | /dev/spidev0.0 |
| 1 | /dev/spidev0.1 |
| 2 | /dev/spidev1.0 |
| 3 | /dev/spidev1.1 |
| 4 | /dev/spidev2.0 |
| 5 | /dev/spidev2.1 |
参考
- SPI 的接口定义、参数说明与适配注意事项请参考 SPI驱动。
在树莓派启用 SPI(系统配置)
sudo raspi-config
在 raspi-config 中按以下路径启用 SPI:
3 Interface Options→I4 SPI→Enable
确认设备节点已创建:
ls /dev | grep spidev
TuyaOpen 的 SPI 示例里,
Application config -> spi port是一个 端口号。 Linux 适配层会把端口号映射到具体设备节点(见platform/LINUX/tuyaos_adapter/src/tkl_spi.c的prv_spi_dev_path()):
spi port = 0→/dev/spidev0.0spi port = 1→/dev/spidev0.1spi port = 2→/dev/spidev1.0spi port = 3→/dev/spidev1.1spi port = 4→/dev/spidev2.0spi port = 5→/dev/spidev2.1比如
spidev0.0 / spidev0.1,对应把spi port设为0 / 1。
进入示例目录
cd examples/peripherals/spi
配置、编译与运行
配置:
tos.py config menu
Choice a board → LINUX → TKL Board Configuration:勾选ENABLE_SPIApplication config:配置spi port、spi baudrate
spi port 建议这样选:
- 需要走
/dev/spidev0.0:设为0 - 需要走
/dev/spidev0.1:设为1
spi baudrate(Hz)建议先用 1000000 或 8000000 跑通回环/通讯,再按外设能力逐步提高。
编译与运行:
tos.py build
sudo ./spi_1.0.0.elf
最小示例
下面代码演示 SPI Master 发送固定字符串(Linux 下走 /dev/spidevX.Y):
说明:完整可编译工程参考
examples/peripherals/spi。
#include "tal_api.h"
#include "tkl_spi.h"
// #define EXAMPLE_SPI_PORT ...
// #define EXAMPLE_SPI_BAUDRATE ...
static void spi_min_demo(void)
{
TUYA_SPI_BASE_CFG_T cfg = {
.mode = TUYA_SPI_MODE0,
.freq_hz = EXAMPLE_SPI_BAUDRATE,
.databits = TUYA_SPI_DATA_BIT8,
.bitorder = TUYA_SPI_ORDER_LSB2MSB,
.role = TUYA_SPI_ROLE_MASTER,
.type = TUYA_SPI_AUTO_TYPE,
};
uint8_t tx[] = "Hello Tuya";
tkl_spi_init(EXAMPLE_SPI_PORT, &cfg);
while (1) {
tkl_spi_send(EXAMPLE_SPI_PORT, tx, sizeof(tx));
tal_system_sleep(500);
}
}
PWM 示例
本示例演示如何在 Raspberry Pi 上使用 TuyaOpen 操作 PWM。
适配说明(Linux TKL PWM)
已支持(可用)
- PWM 输出(
/sys/class/pwm)tkl_pwm_init():export 通道并配置 polarity/period/duty。tkl_pwm_start()/tkl_pwm_stop():写enable启停。tkl_pwm_duty_set():更新占空比。tkl_pwm_frequency_set():更新频率。tkl_pwm_polarity_set():更新极性。tkl_pwm_info_set()/tkl_pwm_info_get():整组参数设置/读取(读取为软件保存的 cfg)。tkl_pwm_multichannel_start()/tkl_pwm_multichannel_stop():多通道依次启停。tkl_pwm_deinit():停止并 unexport。
暂未支持(接口保留,当前实现返回 OPRT_NOT_SUPPORTED)
- PWM 捕获(Capture):
tkl_pwm_cap_start()/tkl_pwm_cap_stop()。- 说明:当前实现直接返回
OPRT_NOT_SUPPORTED。
- 说明:当前实现直接返回
参考
- PWM 的接口定义、参数说明与适配注意事项请参考 PWM驱动。
PWM 实验步骤(以 GPIO18 输出PWM方波为例)
进入示例目录
cd examples/peripherals/pwm
在树莓派启用 PWM(系统配置)
-
确认引脚未被占用:
pinctrl get 18若未被复用,通常会看到类似输出:
18: no pd | -- // GPIO18 = none
-
启用 PWM overlay:
在
/boot/firmware/config.txt末尾添加:dtoverlay=pwm,pin=18,func=2重启树莓派使其生效。
-
重启后确认映射关系:
pinctrl get 18期望看到类似输出(表示已切到 PWM 通道):
18: a3 pd | lo // GPIO18 = PWM0_CHAN2
配置
启动配置界面:
tos.py config menu
Choice a board → LINUX → TKL Board Configuration:勾选ENABLE_PWM- 在同一配置树里设置:
PWM_SYSFS_CHIP = 0(对应/sys/class/pwm/pwmchip0)PWM_SYSFS_CHANNEL_BASE = 2(因为 GPIO18 映射为PWM0_CHAN2)
Application config:选择pwm port = 0(因为是PWM0)
编译与运行
tos.py build
sudo ./pwm_1.0.0.elf
最小示例
下面代码演示 PWM 输出(初始化 + start):
说明:完整可编译工程参考
examples/peripherals/pwm。
#include "tal_api.h"
#include "tkl_pwm.h"
// #define EXAMPLE_PWM_PORT ...
// #define EXAMPLE_PWM_FREQUENCY ...
// #define EXAMPLE_PWM_DUTY ... // 1-10000
static void pwm_min_demo(void)
{
TUYA_PWM_BASE_CFG_T cfg = {
.duty = EXAMPLE_PWM_DUTY,
.frequency = EXAMPLE_PWM_FREQUENCY,
.polarity = TUYA_PWM_NEGATIVE,
};
tkl_pwm_init(EXAMPLE_PWM_PORT, &cfg);
tkl_pwm_start(EXAMPLE_PWM_PORT);
while (1) {
tal_system_sleep(2000);
}
}
如需快速核对 sysfs 节点是否符合预期,可检查 /sys/class/pwm/pwmchip0/ 下是否存在(或可 export)对应的 pwm2。
提示:PWM 的 sysfs 接口依赖内核/overlay 配置;不同镜像的
/boot/firmware/config.txt路径可能不同,请以实际系统为准。
UART 示例
本示例演示如何在 Raspberry Pi 上使用 TuyaOpen 操作 UART。
适配说明(Linux TKL UART)
已支持(可用)
- 基础收发
tkl_uart_init():打开串口设备并用 termios 配置波特率/数据位/校验/停止位。tkl_uart_write():底层write()发送。tkl_uart_read():底层read()接收。tkl_uart_deinit():关闭 fd 并停止接收线程。
- RX 回调通知(近似“中断”语义)
tkl_uart_rx_irq_cb_reg():注册接收回调。- Linux 侧通过线程
select()监听 fd 可读事件,触发后调用回调。
暂未支持(接口保留,当前实现返回 OPRT_NOT_SUPPORTED)
tkl_uart_set_tx_int()/tkl_uart_set_rx_flowctrl()/tkl_uart_wait_for_data()/tkl_uart_ioctl():返回OPRT_NOT_SUPPORTED。
空实现(调用无效果)
tkl_uart_tx_irq_cb_reg():当前为空实现。
设备节点映射(与 FAKE 串口开关相关)
- 当
TKL_UART_REDIRECT_LOG_TO_STDOUT = n(关闭串口重定向,使用真实硬件 UART)时,默认映射为:port 0 -> /dev/ttyAMA0port 1 -> /dev/ttyAMA1port 2 -> /dev/ttyAMA2
- 当
TKL_UART_REDIRECT_LOG_TO_STDOUT = y(开启串口重定向)时,不会访问/dev/ttyAMA*,而是使用 Dummy 串口实现(见下文)。
参考
- UART 的接口定义、参数说明与适配注意事项请参考 UART驱动。
硬件连接注意事项(物理串口)
如果使用物理串口(例如树莓派 UART 引脚对接 USB-TTL 模块或另一块板子的 UART):
- 必须将双方 GND 共地。不共地时常见现象是接收数据乱码、丢字节或通信极不稳定。
串口重定向(Dummy 串口:stdin/stdout/UDP)说明
Linux 平台为了在没有接入真实串口硬件的情况下也能跑通 UART 相关组件,提供了一个 TKL_UART_REDIRECT_LOG_TO_STDOUT 开关(在 LINUX 的 TKL Board Configuration 中)。
当开启重定向(Dummy 串口)后,tkl_uart.c 的行为大致如下(与真实 UART 不同,主要用于联调/演示):
TUYA_UART_NUM_0(port 0):- RX:从当前进程的标准输入
/dev/stdin读取(也就是你运行*.elf的终端键盘输入)。 - TX:写到标准输出
stdout(终端上直接打印)。 - 典型用途:在 SSH/本地终端里直接“键盘输入 → UART RX”,并在屏幕看到“UART TX”输出,不依赖任何
/dev/ttyAMA*。
- RX:从当前进程的标准输入
TUYA_UART_NUM_1(port 1):- RX:通过 UDP socket 接收数据,逐字节喂给上层 RX 回调。
- TX:通过 UDP socket 把数据发到对端。
- 注意:当前实现里 UDP 的 bind/send IP 与端口是固定的(环境相关),不同网络环境下通常需要修改适配层源码后重新编译。
Dummy 模式的限制/注意点:
- 波特率/校验位/停止位等 termios 配置在 Dummy 模式下不等价于真实串口(port 0 仅把 stdin 设为非规范模式以便即时读到字符;stdout 也不具备真实串口时序)。
- Dummy 主要用于“功能跑通/交互演示”,不适合做严肃的串口协议时序验证。
如何选择是否使用串口重定向:
- 如果你希望 UART 示例/CLI 走树莓派真实串口引脚(
/dev/ttyAMA*或/dev/ttyS*),请在:Choice a board → LINUX → TKL Board Configuration- 将
UART redirection (stdin/stdout/UDP) instead of hardware ttyAMA*设为n - 说明:该选项不勾选时,即走物理串口(访问真实的
ttyAMA*/ttyS*设备节点)。
- 如果只是想快速验证 UART 逻辑、且暂时没有外接 USB-TTL/硬件回环线,可以保持该选项为
y。
注意:your_chat_bot 配网二维码输出通道(串口重定向)
在 Linux/树莓派上运行 your_chat_bot 做配网演示时,推荐开启 TKL_UART_REDIRECT_LOG_TO_STDOUT,以便将配网阶段的二维码内容直接输出到当前终端。
1)期望现象(开启重定向)
- 在运行
your_chat_bot*.elf的终端内可以直接看到二维码(二维码字符串/ASCII 图形)。
2)原理说明(输出走 UART0 TX)
your_chat_bot配网阶段的二维码内容通常通过 UART0(TUYA_UART_NUM_0)发送。- 当
TKL_UART_REDIRECT_LOG_TO_STDOUT = y时:UART0 TX 映射到stdout,因此二维码会显示在当前终端。 - 当
TKL_UART_REDIRECT_LOG_TO_STDOUT = n时:UART0 TX 写入真实串口设备(例如/dev/ttyAMA0//dev/ttyS0),因此二维码不会显示在当前终端,而是输出到串口线上。
在树莓派启用 UART(系统配置)
sudo raspi-config
在 raspi-config 中按以下路径配置串口:
3 Interface Options→I6 Serial Port
通常建议按提示选择:
- Disable serial login shell
- Enable serial port hardware
检查系统串口节点:
ls -l /dev/ttyAMA* /dev/ttyS* 2>/dev/null
进入示例目录
cd examples/peripherals/uart
配置、编译与运行
配置:
tos.py config menu
Choice a board → LINUX → TKL Board Configuration:勾选ENABLE_UART
可选:在同一菜单中按需设置 UART redirection (stdin/stdout/UDP) instead of hardware ttyAMA*(是否开启串口重定向 / Dummy 串口)。
- 勾选(
*):开启串口重定向(Dummy 串口:stdin/stdout/UDP),不依赖真实硬件串口设备节点。 - 不勾选(
ttyAMA*/ttyS*设备节点)。
编译:
tos.py build
运行:
sudo ./uart_1.0.0.elf
提醒:示例代码默认使用
TUYA_UART_NUM_0(UART0)。在树莓派上 UART0 可能被系统控制台占用;若运行无回显或打开失败,请先检查系统串口占用情况,并按需修改示例选择的 UART 端口或调整适配层设备节点映射。
最小示例 1:交互式回显(Echo)
这个示例最适合在 Dummy 串口重定向(stdin/stdout)模式下快速验证 UART 通路:你在终端输入什么,它就回显什么。
说明:该思路与
examples/peripherals/uart一致。
#include "tal_api.h"
#include "tkl_output.h"
#define UART_NUM TUYA_UART_NUM_0
static void uart_echo_demo(void)
{
TAL_UART_CFG_T cfg = {0};
cfg.base_cfg.baudrate = 115200;
cfg.base_cfg.databits = TUYA_UART_DATA_LEN_8BIT;
cfg.base_cfg.stopbits = TUYA_UART_STOP_LEN_1BIT;
cfg.base_cfg.parity = TUYA_UART_PARITY_TYPE_NONE;
cfg.rx_buffer_size = 256;
cfg.open_mode = O_BLOCK;
tal_uart_init(UART_NUM, &cfg);
tal_uart_write(UART_NUM, (const uint8_t*)"Please input text:\r\n", sizeof("Please input text:\r\n") - 1);
while (1) {
uint8_t buf[128];
int n = tal_uart_read(UART_NUM, buf, sizeof(buf));
if (n > 0) {
tal_uart_write(UART_NUM, buf, n);
} else {
tal_system_sleep(10);
}
}
}
最小示例 2:硬件回环自检(TX 与 RX 短接)
这个示例用于做“发出去的数据能否原样读回来”的自检(memcmp 校验),通常需要:
- 关闭 Dummy 重定向(使用物理串口设备节点)
- 将同一 UART 的 TX 与 RX 短接(同时确保 GND 共地)
#include <string.h>
#include "tal_api.h"
#include "tkl_uart.h"
static OPERATE_RET uart_loopback_test(TUYA_UART_NUM_E port)
{
TUYA_UART_BASE_CFG_T cfg = {0};
cfg.baudrate = 115200;
cfg.databits = TUYA_UART_DATA_LEN_8BIT;
cfg.parity = TUYA_UART_PARITY_TYPE_NONE;
cfg.stopbits = TUYA_UART_STOP_LEN_1BIT;
cfg.flowctrl = TUYA_UART_FLOWCTRL_NONE;
OPERATE_RET ret = tkl_uart_init(port, &cfg);
if (ret != OPRT_OK) {
return ret;
}
const uint32_t timeout_ms = 5000;
const int bufsize = 8;
uint8_t tx[bufsize];
uint8_t rx[bufsize];
for (int i = 0; i < bufsize; i++) {
tx[i] = (uint8_t)('A' + i);
}
for (int round = 0; round < 3; round++) {
memset(rx, 0, sizeof(rx));
int wr = tkl_uart_write(port, tx, sizeof(tx));
if (wr != (int)sizeof(tx)) {
ret = OPRT_COM_ERROR;
break;
}
int got = 0;
SYS_TIME_T start = tal_system_get_millisecond();
while (got < (int)sizeof(rx)) {
SYS_TIME_T now = tal_system_get_millisecond();
if ((uint32_t)(now - start) > timeout_ms) {
ret = OPRT_TIMEOUT;
break;
}
int rd = tkl_uart_read(port, rx + got, (uint32_t)sizeof(rx) - (uint32_t)got);
if (rd > 0) {
got += rd;
} else {
tal_system_sleep(5);
}
}
if (ret != OPRT_OK) {
break;
}
if (memcmp(tx, rx, sizeof(tx)) != 0) {
ret = OPRT_COM_ERROR;
break;
}
}
tkl_uart_deinit(port);
return ret;
}
Button 示例
本示例演示如何在 Raspberry Pi 上使用 TuyaOpen 的 Button 组件(TDL Button 管理层)处理按键输入。
适配说明(Raspberry Pi:键盘模拟按键)
Raspberry Pi 平台默认通过“键盘输入”模拟按键:你在运行 *.elf 的终端里按下某个字符,即可触发按钮事件。
- 是否启用由板卡 Kconfig 控制:
ENABLE_KEYBOARD_INPUT - 触发按键字符由
BUTTON_NAME指定(默认s)
说明:示例工程里将
TDL_BUTTON_PRESS_DOWN的日志打印成了single click(见examples/peripherals/button/src/example_button.c),它代表“按下”事件。
进入示例目录
cd examples/peripherals/button
配置
tos.py config choice
选择 RaspberryPi.config 对应的数字并按下回车。
tos.py config menu
按“快速开始”完成板卡与型号选择后,进入:
Choice a board → LINUX → Raspberry Pi Board Configuration- 确认
Enable keyboard input for Raspberry Pi已被勾选。 - 设置
Keyboard button device value,例如:s
- 确认
说明:这里的 Keyboard button device value 对应板卡配置项 BUTTON_NAME,表示“用键盘上的哪个字符来模拟按键”。
- 设为
s:在运行*.elf的终端里按下s,会触发名为s的按钮事件。 - 建议使用单个字符(如
s/a/d/1),避免使用多字符字符串,以免不同实现只取第一个字符导致理解偏差。
编译与运行
编译:
tos.py build
运行:
sudo ./button_1.0.0.elf
期望现象
- 在终端按下
BUTTON_NAME对应字符(默认s),会打印一次s: single click(按下事件)。 - 按住不放约 3 秒(示例里
long_start_valid_time=3000ms),会打印s: long press(长按事件)。
Audio Codecs 示例(audio_codecs)
本示例演示如何在 Raspberry Pi 上通过 ALSA 进行录音 + 回放(PCM 16k/16bit/mono),并展示 TuyaOpen 的 TDL Audio 管理层接口用法。
适配说明(Linux ALSA)
- Raspberry Pi(Linux)下音频通过 ALSA 访问
/dev/snd/*。 - 该示例依赖
src/peripherals/audio_codecs组件,并使用 ALSA 驱动实现(tdd_audio_alsa.c)。 - 建议用
sudo运行,或确保当前用户属于audio组(否则可能无法打开声卡设备节点)。
前置检查(确认 USB 声卡已识别)
以 USB 音频模块(例如 YD1076/Y1076)为例,在树莓派终端执行:
aplay -l
arecord -l
ls -la /dev/snd/
你应能在列表中看到类似 card 2: Y1076 ... 的设备。
进入示例目录
cd examples/peripherals/audio_codecs
配置
打开配置界面:
tos.py config choice
选择 RaspberryPi.config 对应的数字并按下回车。
tos.py config menu
按“快速开始”完成板卡选择后,进入:
Choice a board → LINUX → Choice a board → RaspberryPi → Raspberry Pi Board Configuration- 确认
Enable keyboard input for Raspberry Pi已被勾选。 - 设置
Keyboard button device value,例如:s
- 确认
编译与运行
编译:
tos.py build
运行(树莓派上建议用 sudo):
sudo ./audio_codecs_1.0.0.elf
交互说明:示例默认使用键盘按键模拟按钮(通常为 s)。按住开始录音,松开结束录音并回放(以实际日志/行为为准)。
常见问题排查
- 打开
default设备失败
如果看到类似:
ALSA lib pcm_asym.c:... capture slave is not definedAudio capture device 'default' not available: Invalid argument
说明当前系统的 ALSA default PCM 配置不可用于录音。
解决思路:
- 在树莓派上创建
/etc/asound.conf,将default映射到 USB 声卡:
sudo tee /etc/asound.conf >/dev/null <<'EOF'
pcm.!default {
type asym
playback.pcm "plughw:CARD=Y1076,DEV=0"
capture.pcm "plughw:CARD=Y1076,DEV=0"
}
ctl.!default {
type hw
card "Y1076"
}
EOF
创建后可用以下命令验证:
arecord -D default -f S16_LE -c1 -r16000 -d2 /tmp/t.wav
aplay -D default /tmp/t.wav